
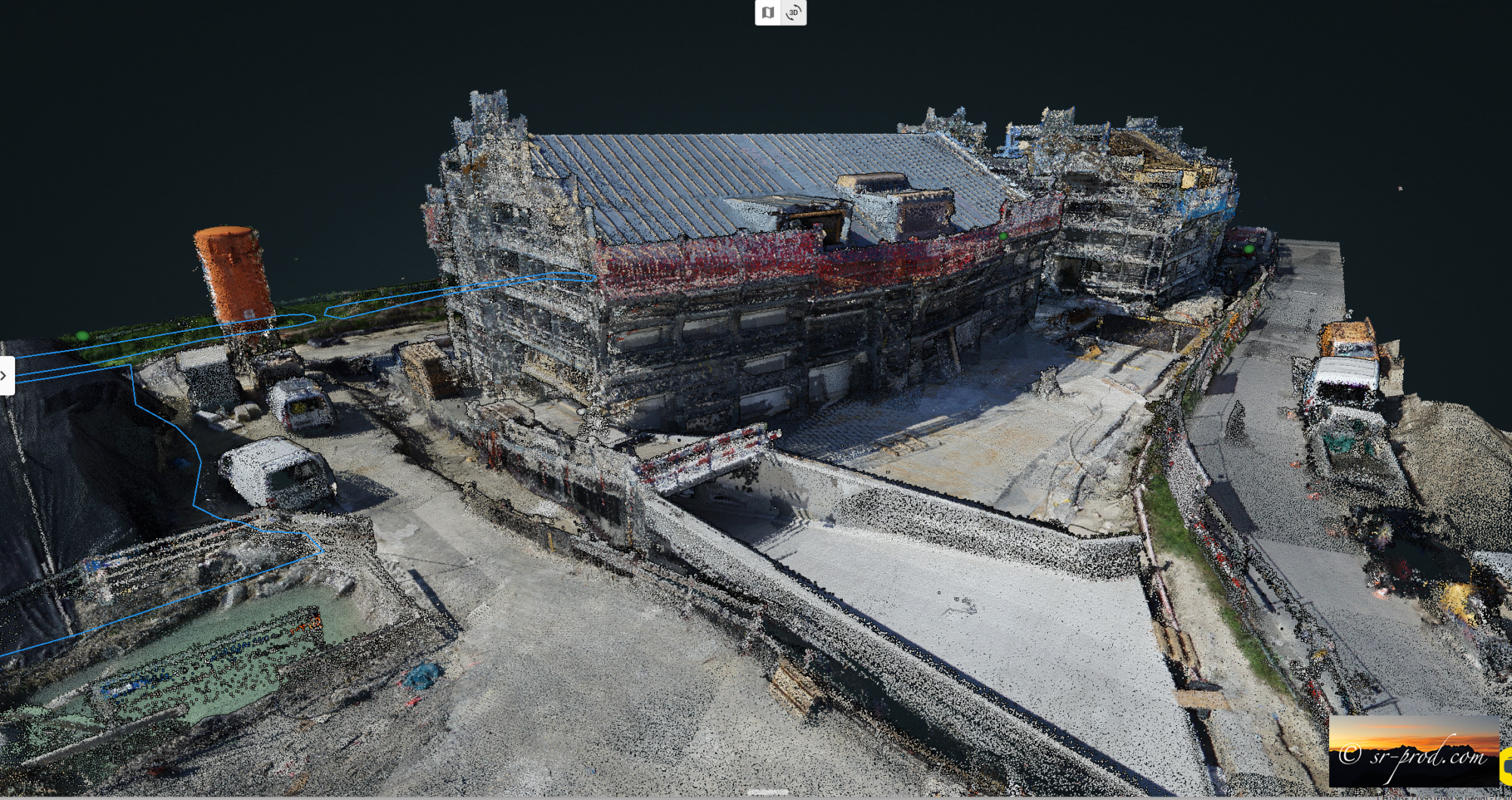
Mission effectuée en deux vols, le premier en mode automatique avec le LiDAR installé en position Nadir pour capturer la toiture et la topographie environnante. Le deuxième vol avec le LiDAR installé en position façade afin de capturer l’ensemble des éléments verticaux comme les murs, échafaudages, façades, avant-toits, etc. Dans cette configuration, le drone est piloté manuellement à très basse altitude autour des structures d’intérêt pour capturer tous les angles possibles.

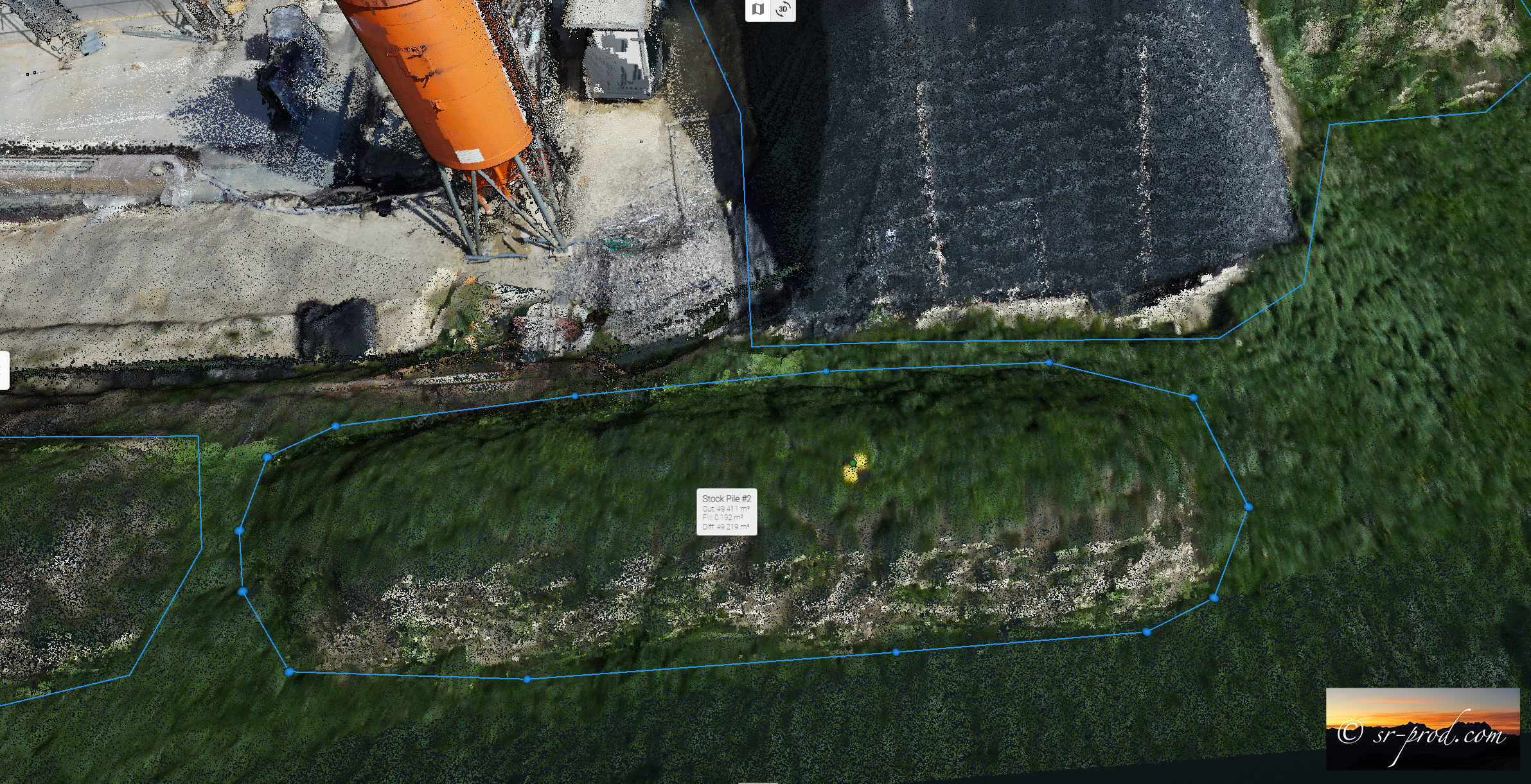
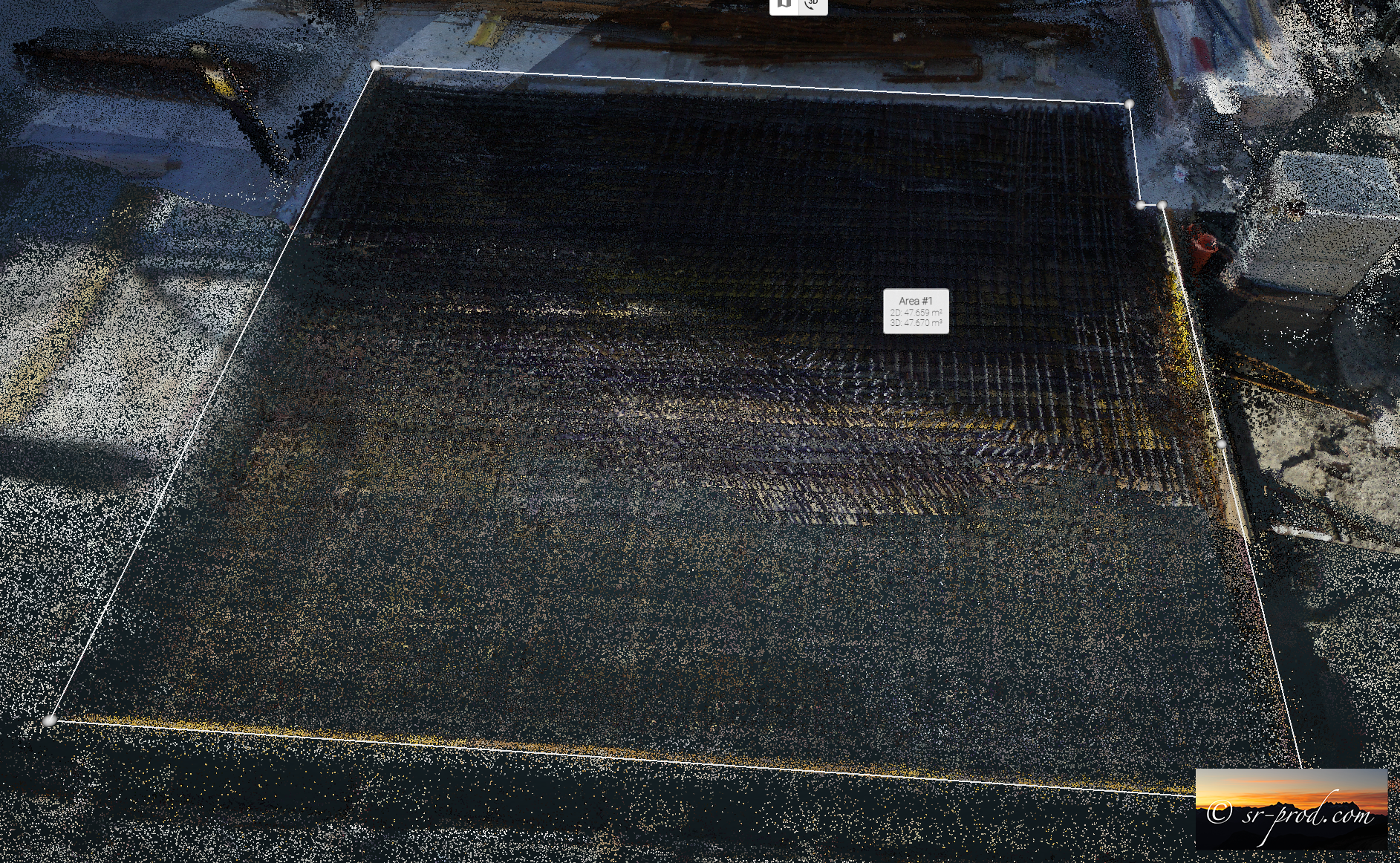
Le but de ce scan est de créer une copie digitale du chantier à un instant T afin d’en surveiller son évolution, de garder une trace pour les archives et d’inspecter le projet sous tous les angles ainsi que de prendre différentes mesures (longueurs, surfaces, volumes).
En parallèle, le partage du modèle via le cloud permet la transmission rapide entre tous les participants au projet ce qui contribue à améliorer la communication entre les parties (promoteur, architecte, entreprises mandatées, clients,…).
Plus spécifiquement les avantages du LiDAR dans ce type de situation sont premièrement sa capacité à capturer très rapidement des centaines de milliers de points grâce au balayage permanent, y compris sur des structures fines (câbles, échafaudages, barrières,…) souvent mal reconstruites en photogrammétrie.
Deuxièmement le LiDAR étant un système actif (envoi et réception d’un signal lumineux), il est indépendant des conditions de lumière contrairement à la photogrammétrie qui dépend de la luminosité externe pour capturer l’information. Ainsi le LiDAR n’est pas « gêné » par les zones sombres ou dans l’ombre, il n’y a donc en principe pas de trou dans le modèle (zone sans données).
Troisièmement chaque point capturé par le LiDAR est positionné dans l’espace en fonction de la localisation très précise de l’appareil au moment de l’émission/réception, son orientation dans l’espace et la distance-temps entre émission et retour (à la vitesse de la lumière). Chaque point n’est donc pas dépendant de la triangulation de points communs contrairement à la photogrammétrie, ce qui évite au LiDAR les erreurs typiques de la photogrammétrie comme les effets de tilt, doming et bowl.
Il faut toutefois noter que les LiDAR aéroportés sont extrêmement dépendant de la qualité de la position GNSS et du traitement en Post Process Kinematik (PPK) ainsi que de la qualité de l’IMU déterminant l’orientation ultraprécise de l’appareil à chaque instant. Un IMU ultraprécis coûte typiquement dans les 15’000 à 20’000$ ce qui explique les prix très élevés des LiDAR de qualité. Des LiDAR de moins bonne qualité comme le L1 de DJI peuvent introduire des variations avec le temps ce qui provoque des ondulations dans les données et donc une mauvaise précision.

Matériel et traitement :
Matrice300RTK équipé du LiDAR R2A de Rock Robotic.
Système GNSS/RTK Emlid Reach RS2, base + rover.
Données LiDAR traitées avec PCMaster & PCPainter, nuage de points exporté sur le RockCloud pour la visualisation et le post-processing (mesures, classification, nettoyage du bruit, …)
4 GCPs mesurés avec un rover GNSS/RTK Emlid Reach RS2
Précision du modèle environ 2cm
Lien vers le nuage de points interactif (bouton 3D pour accéder au nuage de points): https://cloud.rockrobotic.com/share/e2e3c78a-563b-49d1-a2c3-8eaa08d38594