Matrice 300 RTK
Le DJI Matrice 300 RTK est un multicopter spécialisé dans les applications professionnelles. Il permet grâce à sa grande fiabilité, ses nombreux capteurs et sa capacité d’emporter différents types de charges jusqu’à 2.7kg (caméra avec zoom, caméra thermique, LiDAR, appareil photo haute résolution, pulvérisation, système anti-frelons, etc.) d’opérer dans des milieux difficiles et exigeants notamment l’inspection de lignes à haute tension, la surveillance de progression d’incendies, la sécurité des personnes et la cartographie de haute précision.
Équipé de batteries de grande capacité (5935mAh 12S) fonctionnant par paires, le M300RTK est capable d’assurer une redondance en cas de défaillance d’une batterie et dispose d’une autonomie entre 35 et 45 minutes selon la charge embarquée.
Le module RTK embarqué permet au Matrice 300 RTK de fonctionner comme un « rover » connecté à une base et ainsi géolocaliser les données acquises au centimètre près en temps réel.
Le M300RTK est donc l’outil professionnel idéal pour une grande variété de missions.

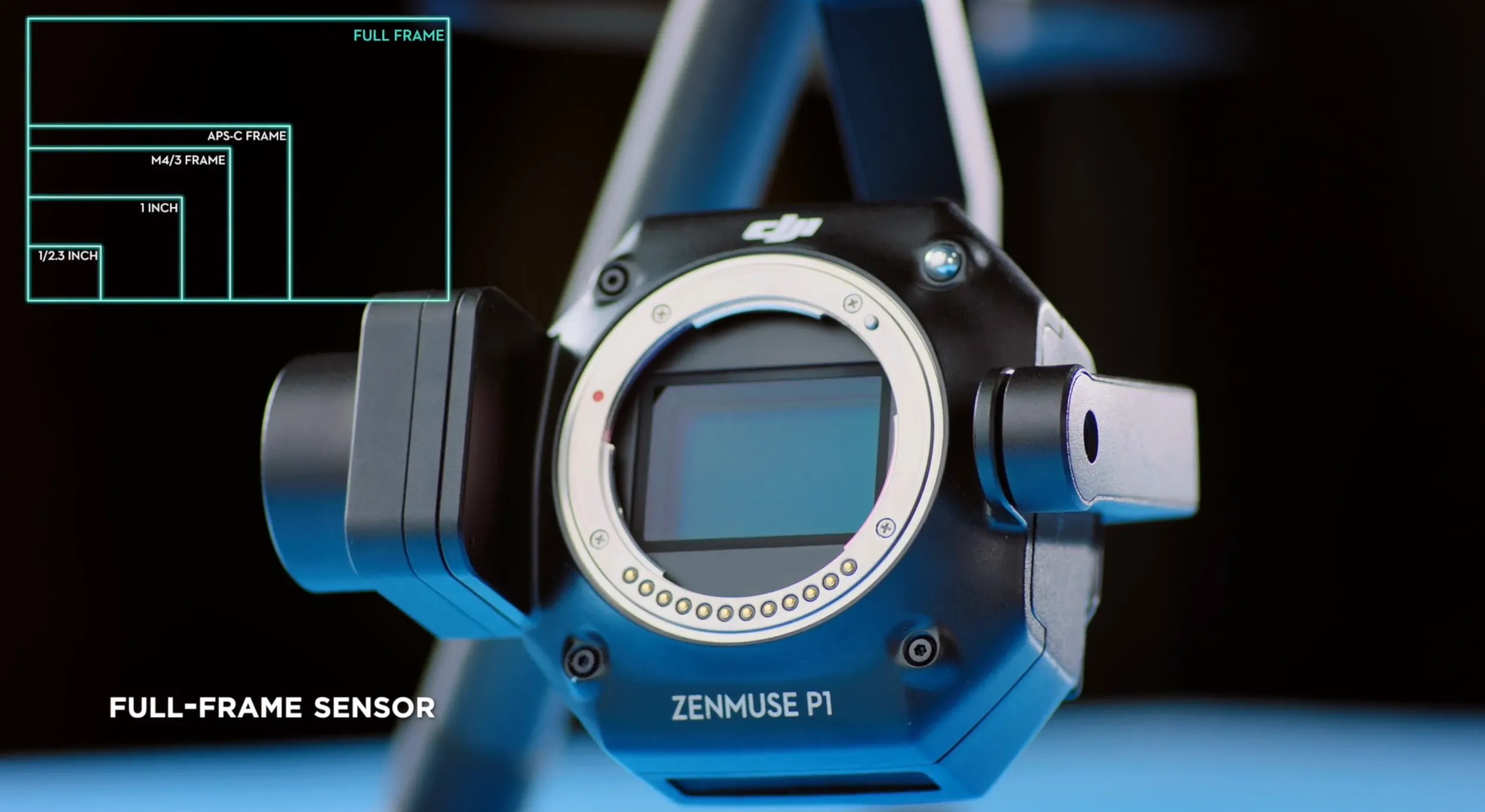
Accessoire M300RTK: Zenmuse P1
La caméra Zenmuse P1 pour le Matrice300RTK est un appareil photo 45 Mégapixels plein format muni d’un obturateur mécanique avec objectifs interchangeables et installé sur une nacelle stabilisée sur 3 axes. Cet appareil photo est spécialisé pour la photogrammétrie et permet d’atteindre une très haute précision avec une résolution millimétrique (par ex : résolution 6mm/pixel à une hauteur de vol de 50m).
Combiné avec les modes de vols intelligents du M300RTK, la P1 peut prendre automatiquement des photos toutes les 0,7s dans différentes orientations optimisées avec la fonction Smart Oblique Capture, permettant de couvrir de très grandes surfaces efficacement.
Les photographies géoréférencées au cm près sont ensuite traitées dans des logiciels spécialisés de photogrammétrie afin de créer des modélisations 2D (orthomosaïque) et 3D (nuage de points, mesh 3D, modèle numérique de la surface, modèle numérique de terrain).
- Types d’utilisations et résultats pouvant être obtenus :
- Inspection de structures comme des ponts, antennes, pylônes, chantiers, routes, création d’un jumeau digital (digital twin) en photogrammétrie.
- Cartographie rapide de grandes surfaces ou de territoires comme une commune, ou une ville entière.
- Modélisation dans le but de mesurer des volumes d’extraction, excavation et remblais par exemple de carrière, gravière, mine, chantier, …
- Résolution de ~1cm/pixel à 100m sol

Accessoire M300RTK: LiDAR ROCK R2A
Le ROCK R2A est une solution LiDAR/SLAM intégrée tout en un composée d’un senseur laser Livox Avia, une IMU très haute précision de Inertial Labs LLC, un système Novatel GNSS et un appareil photo Sony a5100 24MP.
Le Livox Avia est capable d’envoyer 240’00 pulses par secondes, mesurer jusqu’à 720’000 points par secondes (trois retours), pour un champ de vision de 70 degrés et une précision de +-2cm. Grâce à l’intégration avec l’appareil photo, le nuage de points est colorisé et une orthomosaïque peut-être créé à partir des images géoréférencées, le tout en un seul vol.
Le R2A est également utilisable en mode SLAM (Simultaneous Localisation and Mapping), ce qui permet de l’utiliser comme appareil portable et faire des scans LiDAR également depuis le sol et dans les espaces intérieurs sans réception satellite.
Les avantages du LiDAR par rapport à la photogrammétrie sont la grande fiabilité des données produites, la capacité à reconstruire la végétation en nuage de points et également à passer « à travers » le feuillage pour atteindre le sol, permettant une modélisation de la topographie même sous un couvert végétal (ce que la photogrammétrie est incapable de faire).
Un autre avantage important à considérer est que le LiDAR fonctionne dans toutes les conditions de luminosité, ce qui lui donne une grande flexibilité d’utilisation, y compris de nuit.
L’overlap latéral nécessaire est bien inférieur à la photogrammétrie (de l’ordre de 30% vs 75%) ce qui optimise le temps de vol et finalement le temps de traitement largement inférieur pour produire un livrable.
Le principal désavantage est la précision limitée par la qualité de la position GNSS/PPK et les données de l’IMU, ce qui empêche de descendre en dessous de quelques centimètres (2-5cm) sur une plateforme aéroportée. La hauteur de vol est également plus limitée en fonction de la réflectivité des matériaux, le vol se fait en général à environ 50m-60m.
Types d’utilisations et résultats pouvant être obtenu :
- Relevés de terrain en zone végétalisée avec création d’un Modèle Numérique de Terrain (MNT) très précis.
- Scan de structures pour réaliser un jumeau digital sur lequel des mesures précises sont possibles. Y compris sur des éléments sur lesquels la photogrammétrie fonctionne difficilement comme les surfaces lisses ou des structures fines comme des câbles, lignes de contacts, caténaires.
- Modélisation dans le but de mesurer des volumes d’extraction, excavation et remblais par exemple de carrière, gravière, mine, chantier, …
- Cartographie rapide de grandes surfaces ou de territoires comme une commune, ou une ville entière (le R2A est équipé d’une caméra 24MP capable de réaliser des orthomosaiques).
- Fonctionnement dans toutes les conditions de luminosité, y compris de nuit
- Modélisation de la végétation en 3D pour la gestion des forêts par exemple.
- Précision dépendante des surfaces, mais autour de ~2cm à 50m

Mavic 3 Enterprise
Le Mavic 3 enterprise est un excellent compris entre performance et compacité destiné à l’inspection en tout genre et à la photogrammétrie de haute qualité.
Le M3E dispose d’excellentes performances photographiques grâce à son capteur 4/3 20MP avec shutter mécanique, c’est donc un appareil spécialement dédié à la constitution de modèles 2D & 3D, tels que les cartes, orthomosaiques et nuages de points. Son capteur lui permet d’obtenir une résolution de l’ordre de ~1cm/pixel à 40m.
Equipé d’une antenne RTK, le M3E peut fonctionner comme un rover connecté à une base, à l’instar de la M300RTK
Cet appareil est particulièrement adapté pour toutes les missions dans les milieux restreints et dans les situations où le poids d’un M300RTK serait une limitation technique ou légale.

Système GNSS/RTK Emlid Reach RS2

Les récepteurs GPS/GNSS « grand public » équipant la plupart des appareils courants ainsi qu’une grande partie des drones ne permettent qu’un positionnement approximatif (100 à 500cm) pour différentes raisons : petites déviations d’horloge, perturbations dans l’atmosphère, erreurs d’orbite, etc…
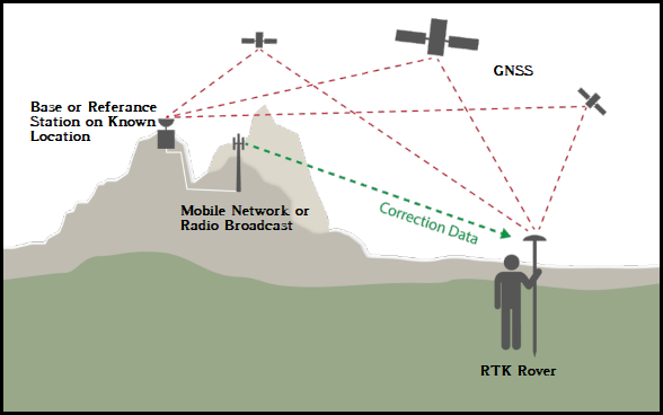
Le système GNSS/RTK Reach RS2 de Emlid spécifiquement adapté aux levés de terrains permet quant à lui d’atteindre une précision centimétrique (1 à 3cm).
Ce système fonctionne selon le principe suivant : une base fixe détermine l’erreur de position en temps réel et transmet les informations de correction à appliquer à un rover (antenne mobile). A cette fin, le rover est déplacé dans le terrain pour mesurer différents points (par exemple des cibles) qui seront ensuite utilisés dans la modélisation 3D avec le drone afin de géoréférencer, corriger et valider les modélisations de manière très précise.

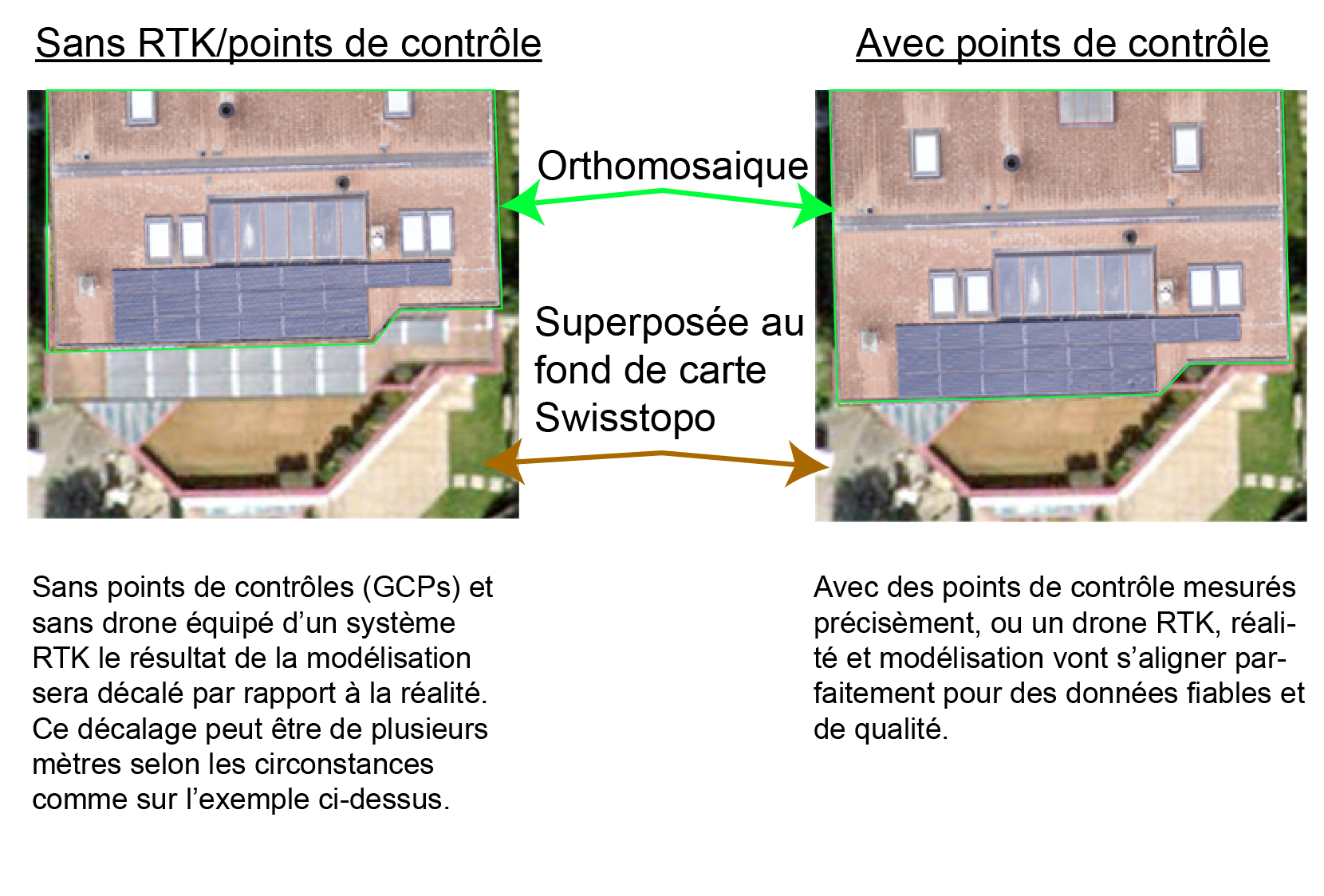
Lorsqu’un modèle 3D est produit sans utiliser de système RTK et sans points de contrôle (GCPs), celui-ci aura en principe une bonne précision relativement aux données de GNSS reçues mais avec un décalage par rapport aux coordonnées réelles dû aux erreurs mentionnées précédemment.
Des mesures de distances et volumes seront possibles sur un tel modèle (on parle de précision relative), mais pas des comparaisons avec la réalité ou d’autres modèles et notamment pas de validation de la fiabilité des données.
En revanche, si le modèle est corrigé par des GCPs, sa qualité pourra être validée et des comparaisons seront possibles avec d’autres modèles, ainsi qu’avec la réalité (précision absolue)
Ainsi la comparaison entre plusieurs modèles corrigés d’un même lieu et pris à intervalles réguliers permet entre autres des calculs de différences de volumes (volume d’un glacier, volume d’excavation/remblais, mouvements de terrain,…).
Le modèle étant une « copie digitale » de la réalité, n’importe quel point de celui-ci peut être retrouvé très précisément sur le terrain réel grâce à ses coordonnées géographiques et à l’antenne mobile RS2. C’est un autre avantage découlant du géoréférencement très précis.