

Les récepteurs GPS/GNSS « grand public » équipant la plupart des appareils courants ainsi qu’une grande partie des drones ne permettent qu’un positionnement approximatif (1 à 5m) pour différentes raisons : petites déviations d’horloge, perturbations dans l’atmosphère, erreurs d’orbite, etc…
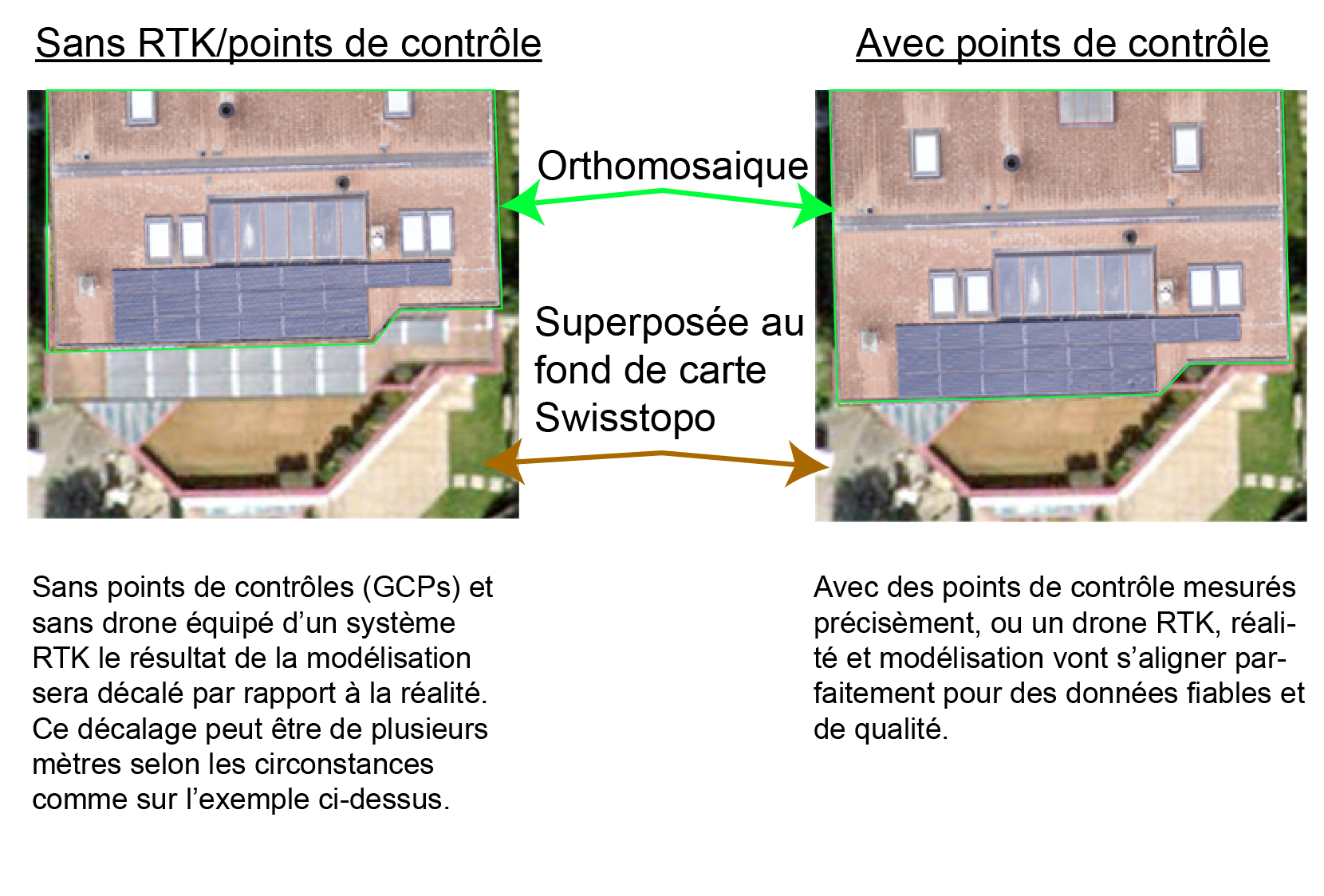
Ainsi les données acquises sans utiliser de système de géoréférencement précis présenteront un décalage systématique par rapport à leur position réelle si le modèle venait à être superposé à une carte topographique ou des images aériennes de référence.
Des mesures de distances et volumes seront possibles sur un tel modèle (on parle de précision relative), mais pas des comparaisons avec la réalité ou d’autres modèles et notamment pas de validation de la fiabilité des données.
En revanche, si le modèle est corrigé, sa qualité pourra être validée et des comparaisons seront possibles avec d’autres modèles, ainsi qu’avec la réalité (précision absolue)
Ainsi, la comparaison entre plusieurs modèles corrigés d’un même lieu et pris à intervalles réguliers permet entre autres des calculs de différences de volumes (volume d’un glacier, volume d’excavation/remblais, mouvements de terrain,…).
Le modèle étant une « copie digitale » de la réalité, n’importe quel point de celui-ci peut être retrouvé très précisément sur le terrain réel grâce à ses coordonnées géographiques et à l’antenne mobile RS2. C’est un autre avantage découlant du géoréférencement très précis.
De plus, sans moyen de validation externe, il est impossible de vérifier la qualité de modèle.
Il existe deux méthodes principales pour géoréférencer un modèle. La première consiste à poser des cibles qui seront mesurées précisément avec un système RTK ou une station totale. Avec cette méthode, n’importe quel drone équipé d’un appareil photo peut être utilisé pour l’acquisition des données.
La deuxième méthode consiste à utiliser un drone équipé d’un récepteur RTK connecté à une base fixe.
Système RTK
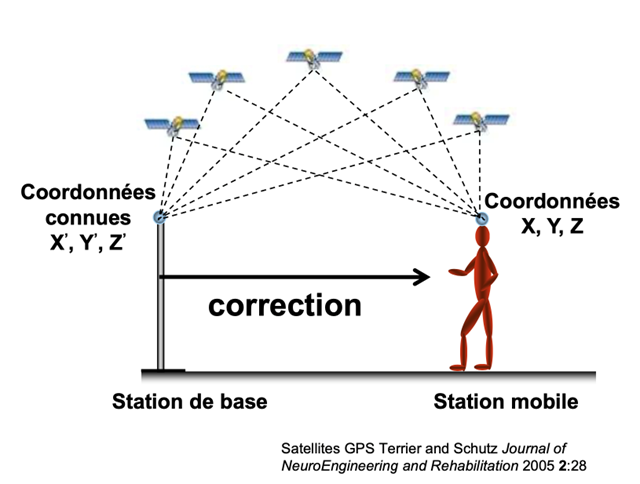
Le concept de fonctionnement général d’un système RTK est le suivant : une base fixe installée sur un point connu détermine l’erreur en temps réel l’erreur entre position connue et position calculée avec les satellites et transmet les informations de correction à appliquer à un rover (antenne mobile).
Le rover est déplacé dans le terrain pour aller mesurer différents points comme des cibles par exemple.
Le système de mesure que nous utilisons est le Reach RS2 de Emlid qui est spécifiquement adapté aux levés de terrain et permet d’atteindre une précision centimétrique (1 à 3cm).

Méthode A – Points de contrôle
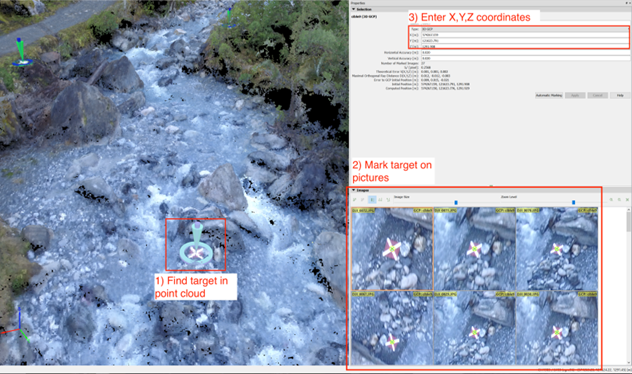
Le principe est de disposer des cibles sur le terrain avant de procéder au vol, chaque cible est mesurée précisément avec un rover RTK. Lors du vol les cibles apparaitront dans les photographies de la zone d’intérêt.
Lors du traitement, ces cibles seront ensuite marquées manuellement dans les photos et les coordonnées des points entrés pour chacun d’entre eux.
Ces points vont ainsi venir « ancrer » le modèle lors du Processing de la photogrammétrie et corriger l’éventuel décalage ainsi que d’autres erreurs de la photogrammétrie (doming, bowl, tilt)

Méthode B – Drone RTK
Certains drones sont capables de fonctionner comme un rover en recevant directement les données de positions corrigées depuis une base fixe. Chaque photo prise par le drone est ainsi géoréférencée au centimètre près, ce qui permet une précision absolue élevée lors du processing du modèle.
Cette méthode nécessite toutefois une bonne réception réseau mobile pour recevoir les corrections par internet, ou d’avoir une base dGPS avec vous sur le terrain, ou encore de traiter les données en PPK à défaut (Post Processing Kinematic).
Le grand avantage de cette méthode est de réduire le temps d’acquisition des données sur le terrain en éliminant la nécessité de placer et mesurer des cibles. Il est même parfois impossible d’aller placer des cibles dans certains terrains dangereux, un drone RTK est donc un outil précieux dans ce genre de situation.
Le défaut de cette méthode sans utiliser de cibles est l’impossibilité de valider la qualité du modèle via des Check Points (Points de validation) et donc de s’assurer que des erreurs typiques de la photogrammétrie ne se sont pas propagées (tilt, doming, bowl).
Chaque situation demande une appréciation quant à la méthode à utiliser afin d’obtenir les meilleurs résultats possibles.

